 1")
Unmanned driving data labeling refers to the process of labeling road perception data for training unmanned driving systems. Road perception data includes a variety of information, such as camera images, lidar data, ultrasonic data, etc., which can provide road scene information required by driverless systems.
Unmanned driving 3D point cloud annotation refers to the process of annotating three-dimensional point cloud data for training unmanned driving systems. The unmanned driving system needs to use 3D point cloud data to identify road scenes and make corresponding decisions. Unmanned driving 3D point cloud annotation can help unmanned driving system understand road scenes and provide a basis for unmanned driving decision-making.

3D point cloud annotation method:
There are many methods for 3D point cloud annotation, including methods based on deep learning, methods based on segmentation, methods based on point cloud classification and positioning, methods based on statistical learning, and so on. Deep learning methods can be used to identify objects, segmentation-based methods can extract geometric structure information of objects, methods based on point cloud classification and localization can be used to locate objects, and methods based on statistical learning can be used to detect the space between objects relation.
Application of 3D point cloud annotation in unmanned driving scenarios:
The application of 3D point cloud annotation in unmanned driving data scenarios is mainly used to extract the geometric structure information of spatial objects, and to detect the boundaries and spatial relationships of objects, so as to provide functions such as path planning and road surface recognition for unmanned driving systems. For example, point cloud annotation can be used to identify road edges, detect street signs, detect road segments and intersections, and detect obstacles in the surrounding environment.
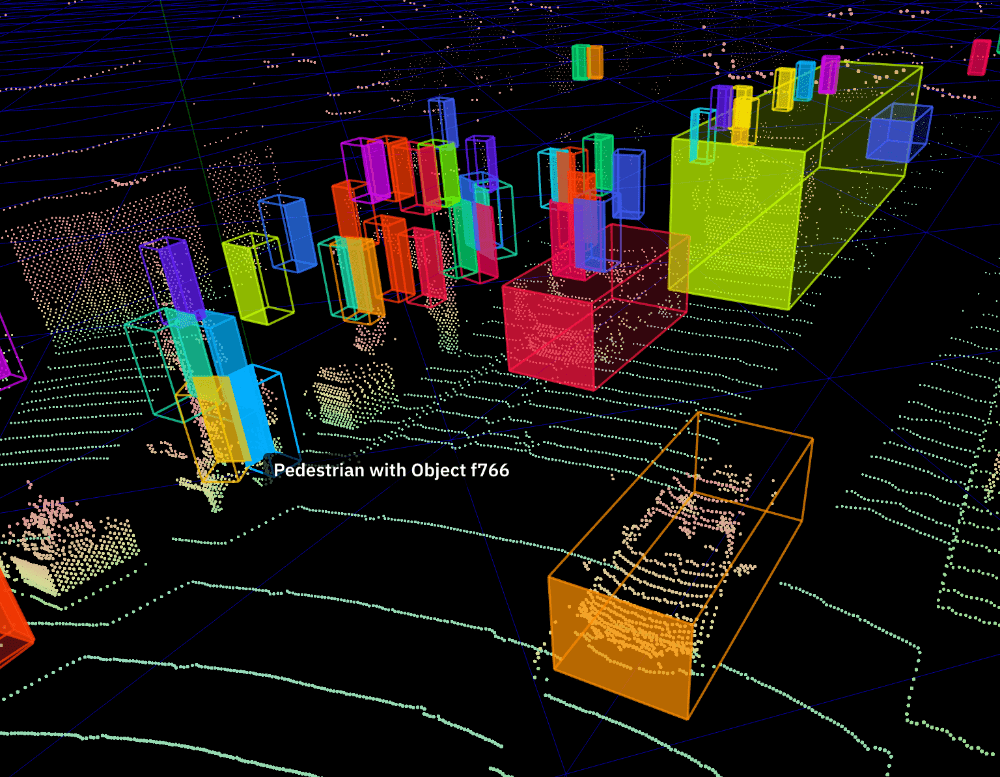
In addition, 3D point cloud annotation can also be used to classify and locate ground objects, as well as ground coverings such as road markings, street lights, and signal lights. In addition, point cloud annotation can also be used to detect pedestrians, vehicles, and other objects, as well as detect the spatial relationship between pedestrians, vehicles, and other objects, as well as their behavior.
How to use unmanned driving 3D point cloud annotation?

When using unmanned 3D point cloud annotation, it is first necessary to collect and organize the 3D point cloud data, such as establishing a point cloud grid, creating a feature type, marking the feature type, and so on. Then, professional software can be used for real-time or offline 3D point cloud annotation, and the annotated information can be sent to unmanned vehicles to support their decision-making. Finally, visualization tools can be used to view and analyze the annotated 3D point cloud data to better understand the environment and plan routes.