 1")
The perception algorithm based on 3D point cloud data is the core technology path of some autonomous driving companies, and has created a large-scale demand for 3D point cloud data labeling. So, what is 3D point cloud annotation? What are the methods for 3D point cloud annotation? Let’s introduce it below.

What is 3D point cloud annotation?
The point cloud can be understood as a collection of points in the coordinate system, which is a three-dimensional digital representation of the target surface structure. The point cloud is composed of scattered three-dimensional points, which can not only provide accurate three-dimensional position information, but also provide intensity, color, etc. information.
Point cloud data is generally obtained by 3D scanning equipment such as lidar to obtain information of several points in space, including XYZ position information, RGB color information and intensity information, etc., which is a multi-dimensional complex data collection.
Compared with 2D images, 3D point cloud data has great advantages. It can provide rich geometric, shape and scale information; and it is not easily affected by changes in illumination intensity and occlusion of other objects. Therefore, 3D point cloud annotation can provide a good understanding of the surrounding environment of the machine.
3D point cloud labeling refers to the use of data collected by lidar for frame selection and labeling, which is used for artificial intelligence model training such as computer vision and driverless driving.
3d point cloud annotation method:
2. 3d point cloud semantic segmentation
3D point cloud semantic segmentation is used in many fields such as autonomous driving and robotics. At present, it has become the key to scene understanding.
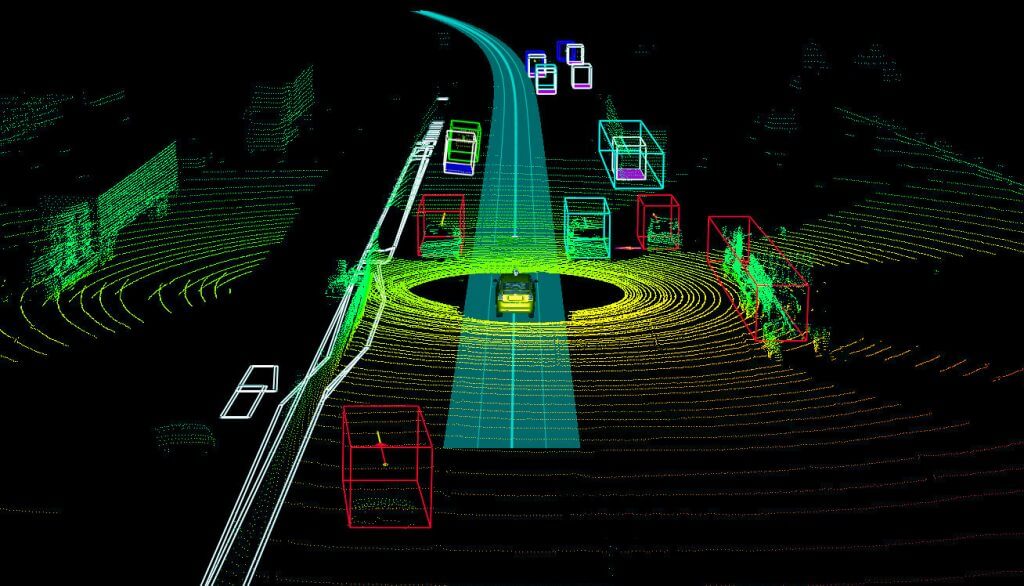
2. 3D point cloud image annotation
3D point cloud image annotation data is the basic training data for unmanned driving technology. The 3D point cloud image annotation is to mark the target object through the 3D frame in the 3D image collected by the lidar. Target objects include vehicles, pedestrians, advertising signs and trees, etc.
3. Continuous frames of 3d point cloud
3D point cloud continuous frame labeling is a widely used data processing type in autonomous driving scenarios, which requires high three-dimensional space perception capabilities and multi-frame collaborative processing capabilities.

3d point cloud annotation applied to automatic driving:
3D point cloud annotation can help the training of automatic driving mode. Based on its rich experience in automatic driving annotation and advanced annotation tools, it can frame select 3D obstacles and perform semantic segmentation on radar images to help vehicles better perceive the road surface. It can be applied to the training landing of automatic driving scenarios.